MavADSB
Loads ADSB data into Mission Planner or QGC without a need for an ADSB receiver. This data can be forwarded to the UAS (via telemetry link) for collision avoidance without the need for an onboard ADSB-in receiver or any additional hardware. Works on Mac, Linux or Windows.


Basic usage
Make sure to have Java installed. Get the Jar file in out/artifacts/MavADSB_jar/ and type this into the terminal:
java -jar MavADSB.jar lat lon
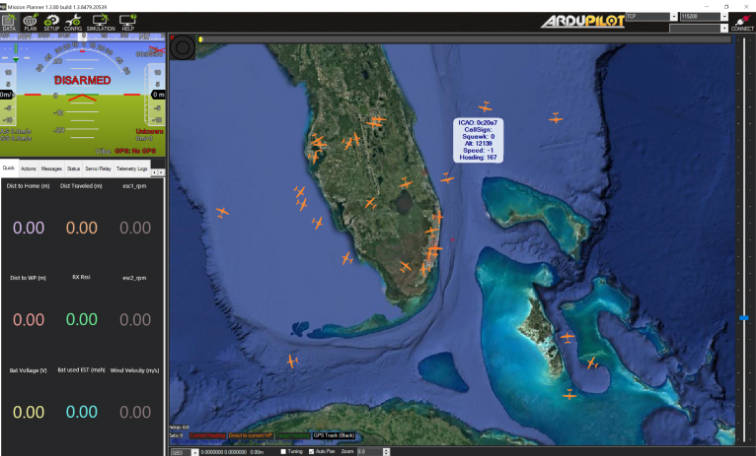
Replace lat and lon with your location, and it will display all ADSB data within 250nm
Advanced usage
java -jar MavADSB.jar lat lon radius interval
Replace radius with the polling radius around lat,lon (up to 250) in nautical miles. Optional
Replace interval with the polling interval in milliseconds (minimum 1000) in milliseconds. Optional
Mission Planner integration
After running the Jar file, please open Mission Planner and go to config tab -> Planner and look for the “Adsb” checkbox. Enable this and restart Mission Planner

QGroundControl integration
After running the Jar file, please open QGC and click the Q on the top-left. Go into application settings and scroll to the bottom. Enable ADSB and restart QGC

API & Docs
Install Java: https://www.java.com/en/download/
ADSB-One API: https://github.com/ADSB-One/api/blob/main/README.md
SBS-1 Info: http://woodair.net/SBS/Article/Barebones42_Socket_Data.htm
Server runs on localhost:30003
Traditional methods
GCS connected USB dongle: https://uavionix.com/products/pingusb/
UAS connected ADSB rx: https://uavionix.com/products/pingrx-pro/
It is still recommended to use the above for least latency. However paired with this software the range is greatly extended. Enjoy ?