ELEC3875-Final-Project
My undergraduate final project: Parking Robot based on 3D LiDAR. ELEC3875 / XJEL3875
Keywords: Automatic Parking, SLAM, 3D Navigation, Remote Control, ROS, RRT
Introduction
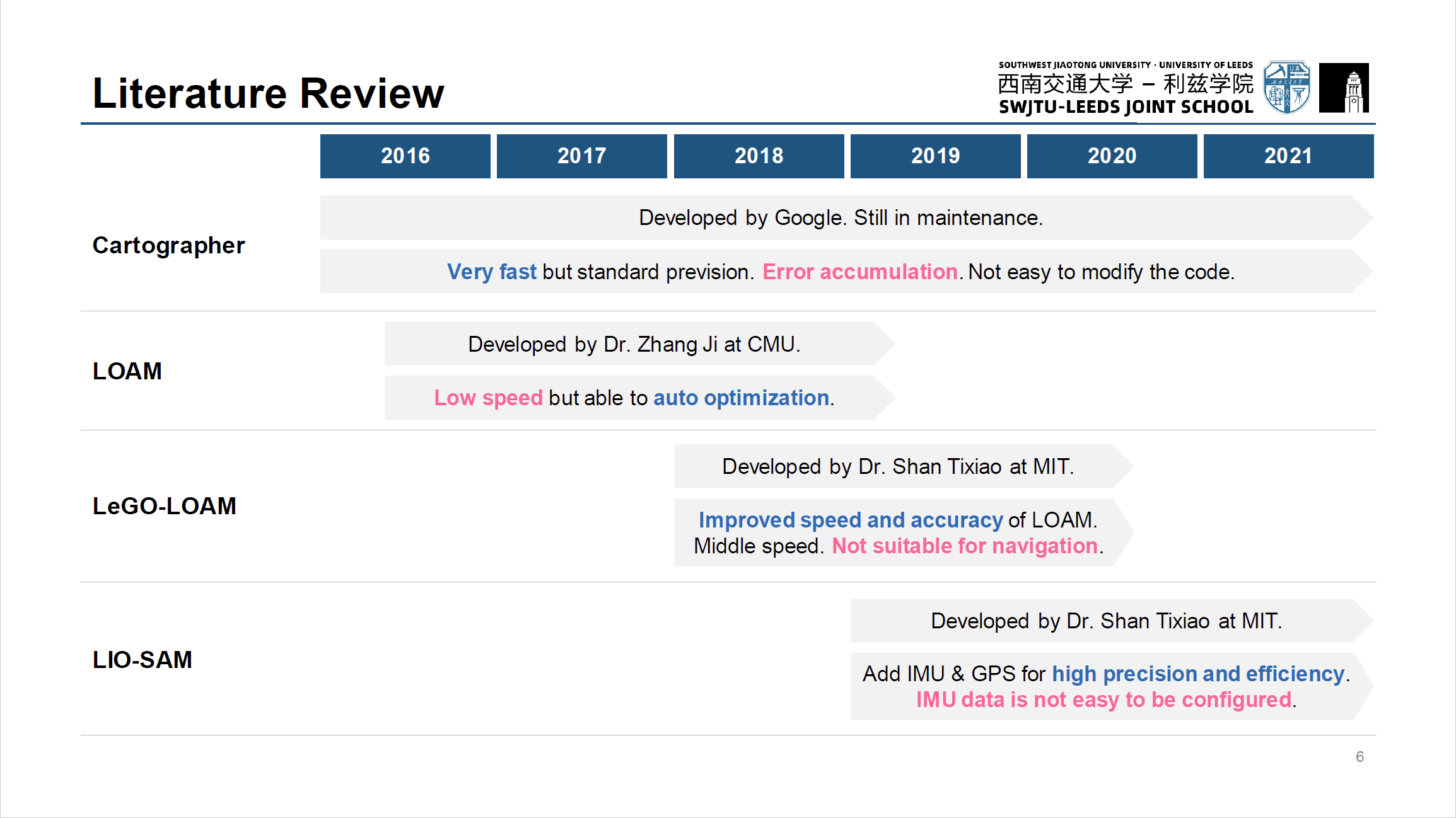
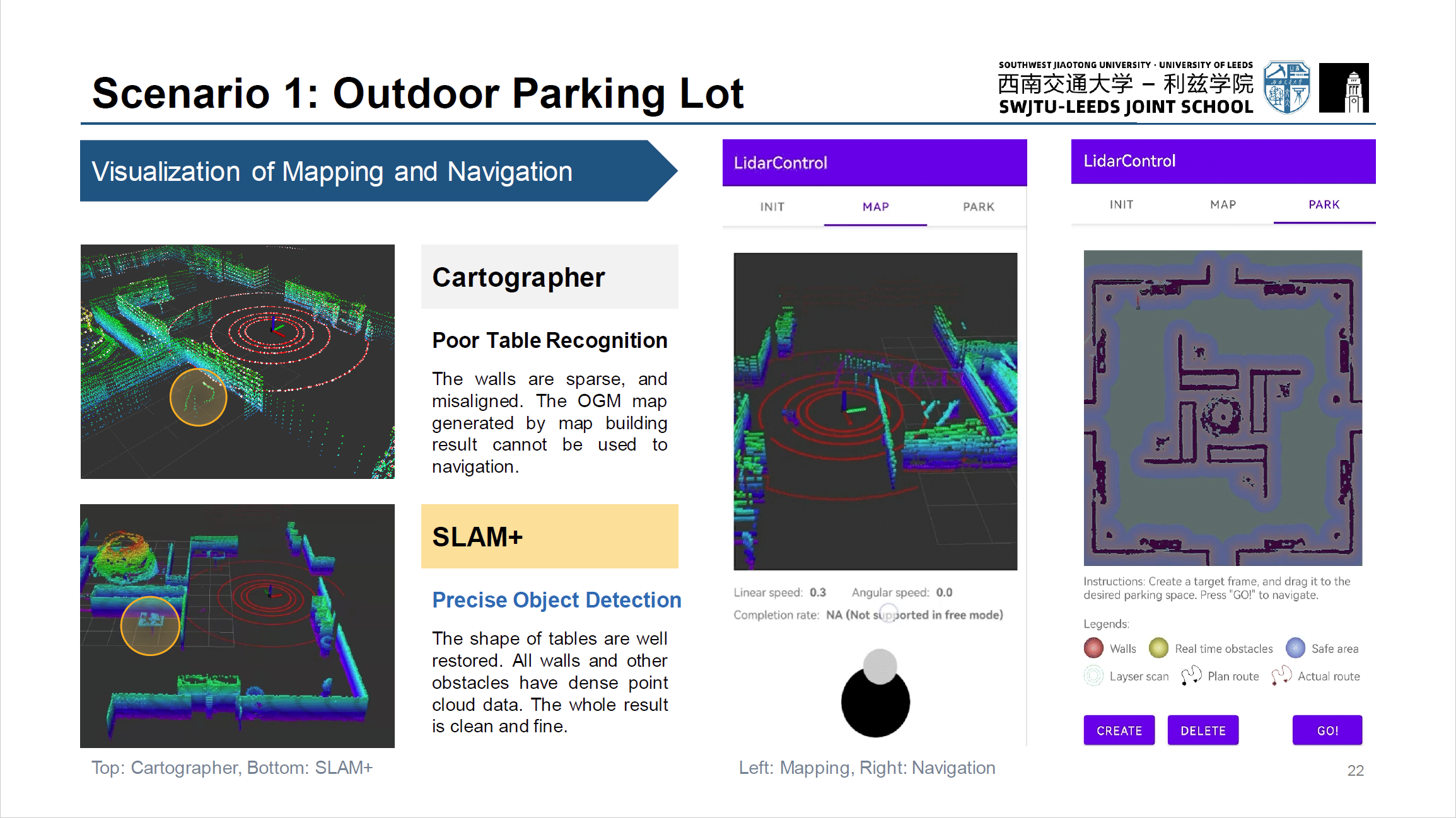
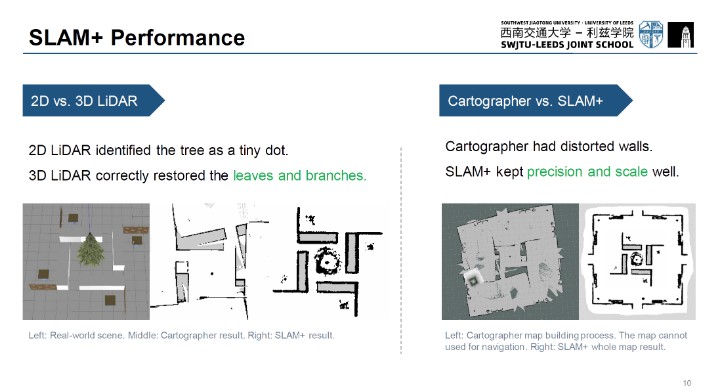
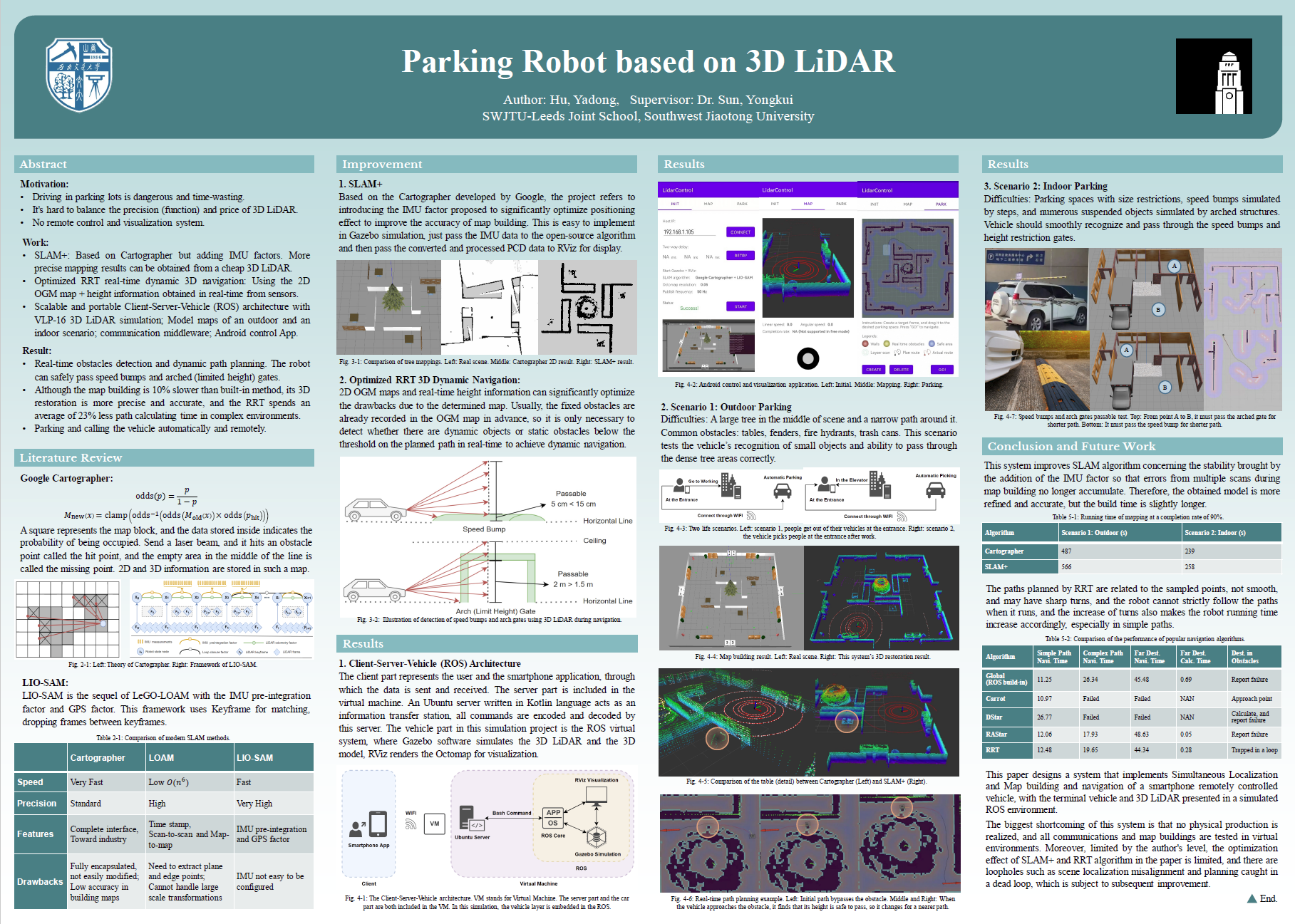
This paper proposes SLAM+, an improved algorithm based on Google Cartographer, by adding IMU factors adapted from a state-of-the-art method LIO-SAM. IMU pre-integration allows measurements from multiple sources, and the pose can be calculated more accurately from a cheap 3D LiDAR.
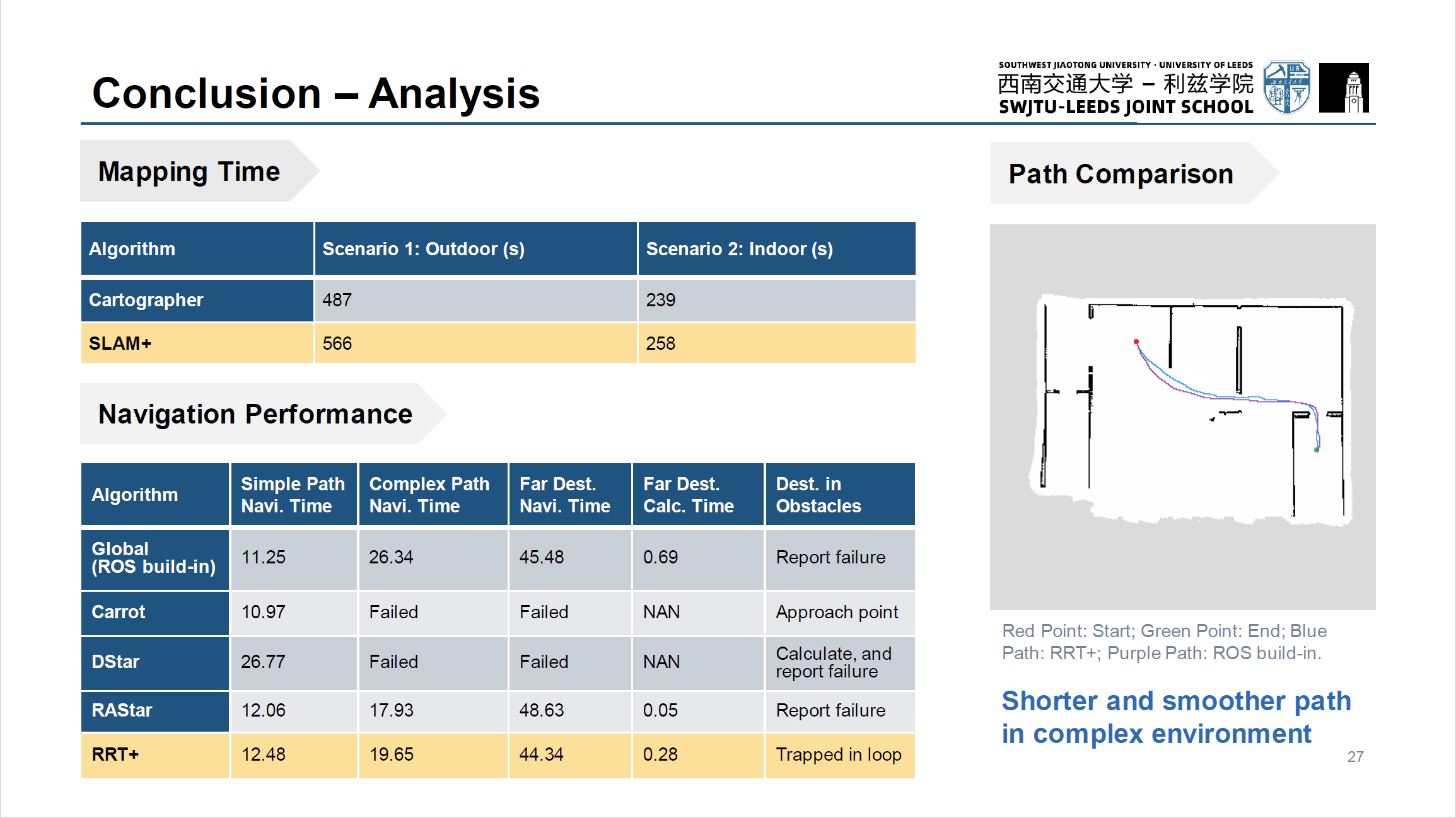
This paper also introduces an optimized RRT real-time dynamic 3D navigation method. Using the 2D planar map + height information obtained in real-time from LiDAR sensors, this algorithm can navigate more safely by recognizing, e.g., speed bumps, moving people and limited height gates, frequently seen in parking lots.
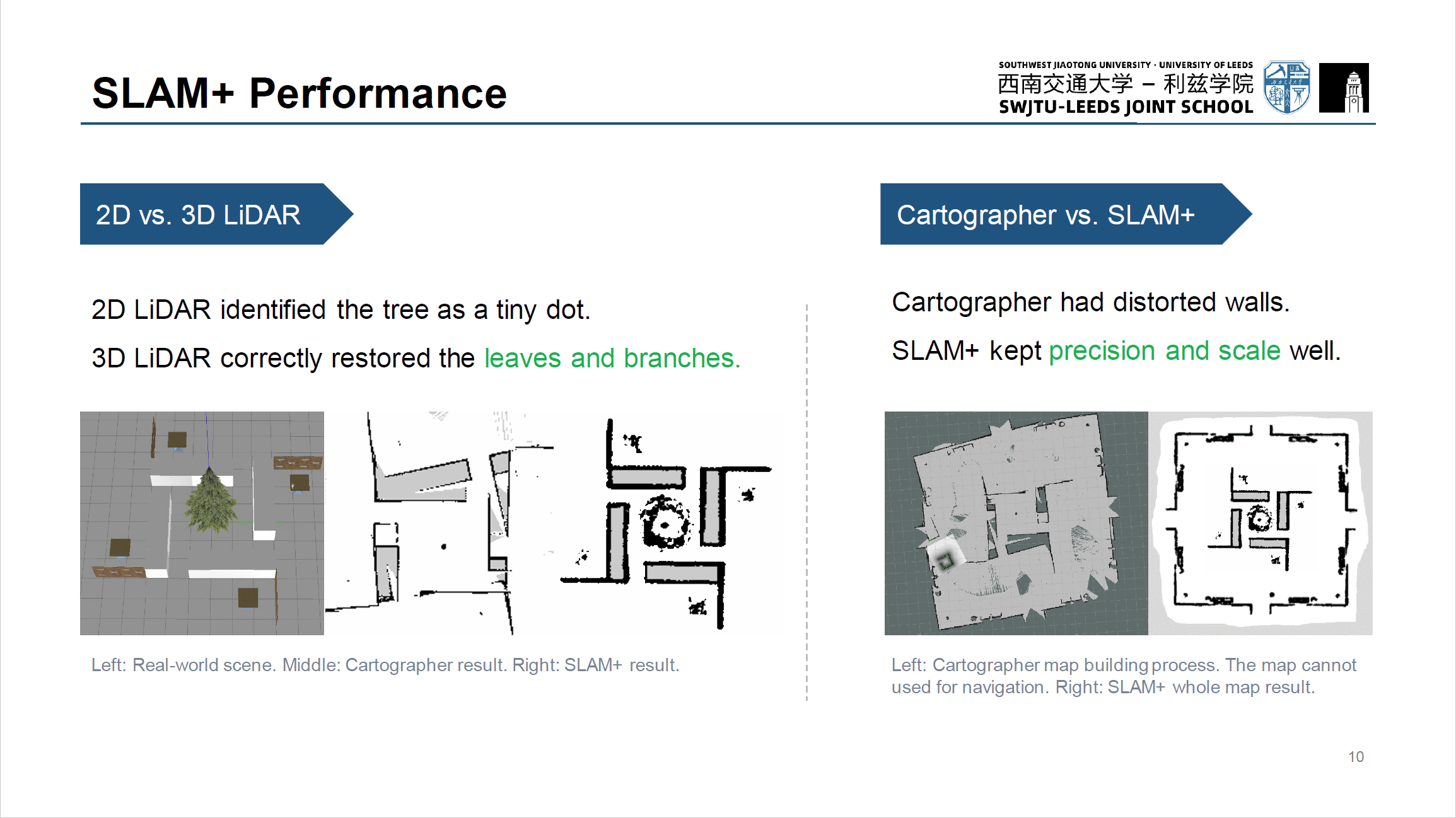
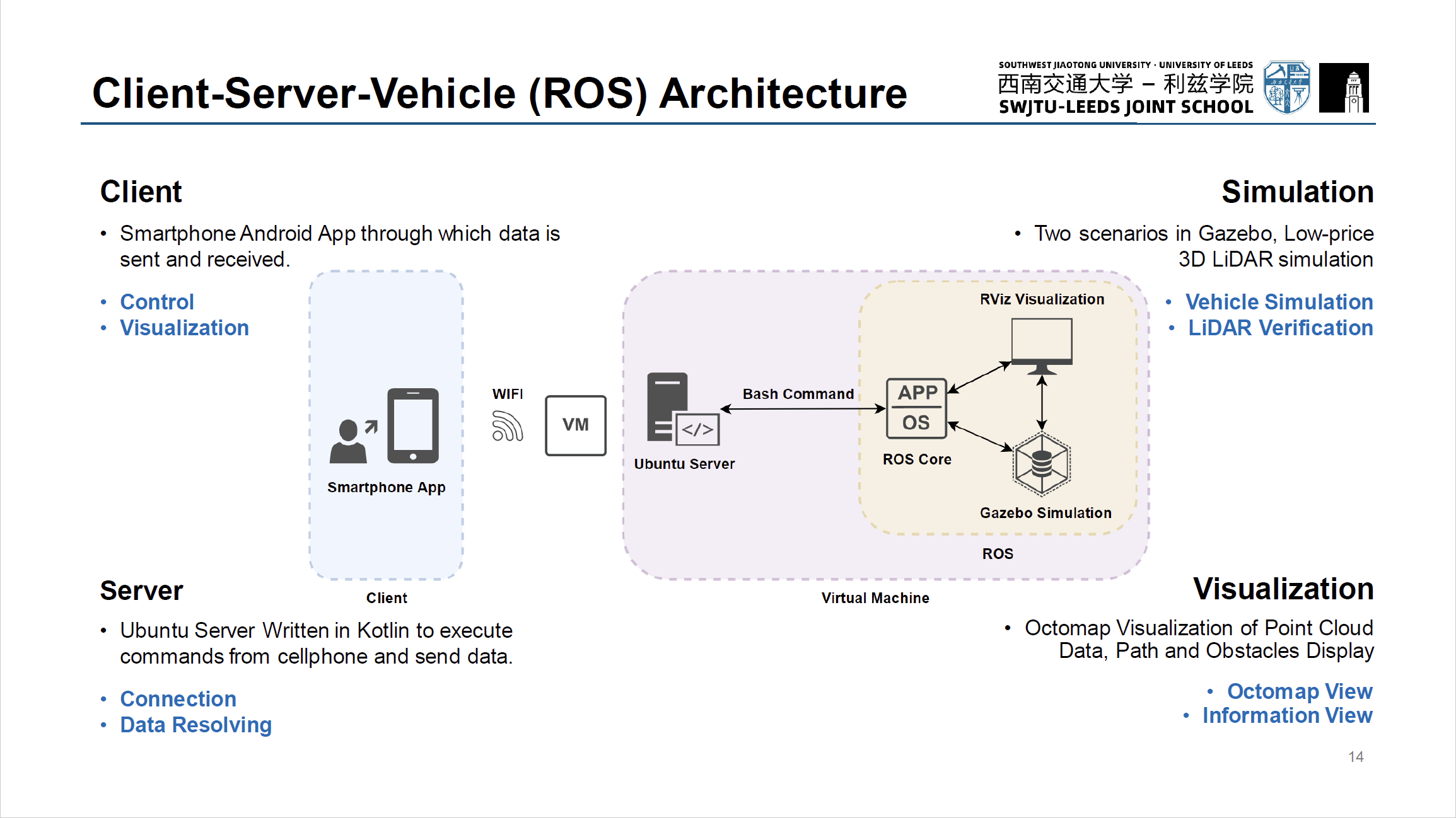
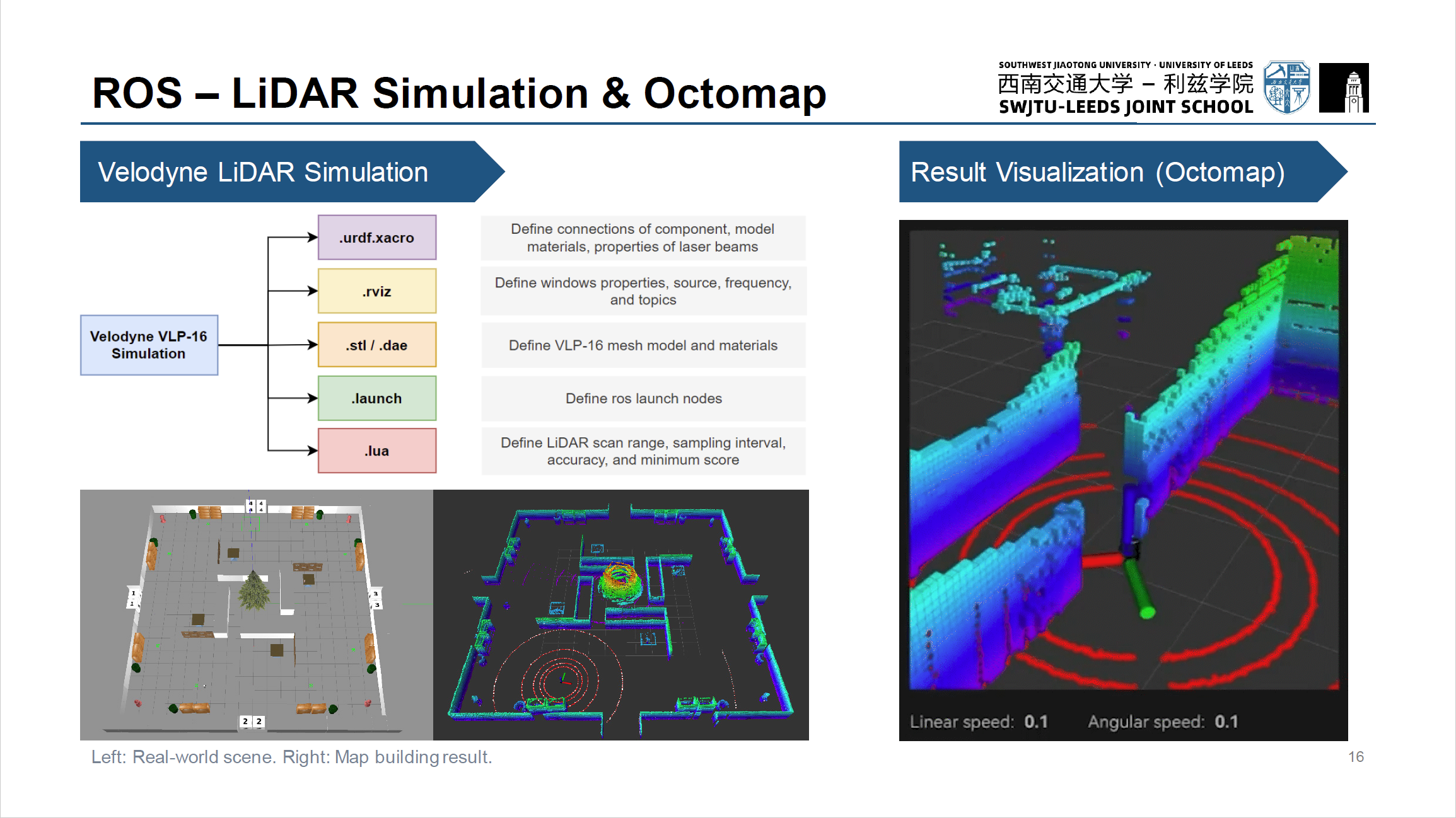
Finally, a Client-Server-Vehicle three-layer architecture is built to test the performance of this system. The optimized algorithms are thoroughly tested and perform well in the virtual scene by implementing the Velodyne VLP-16 3D LiDAR simulation and building model maps of an outdoor and an indoor scenario. With real-time obstacles detection and dynamic path planning, the robot can safely pass speed bumps and arched (limited height) gates.
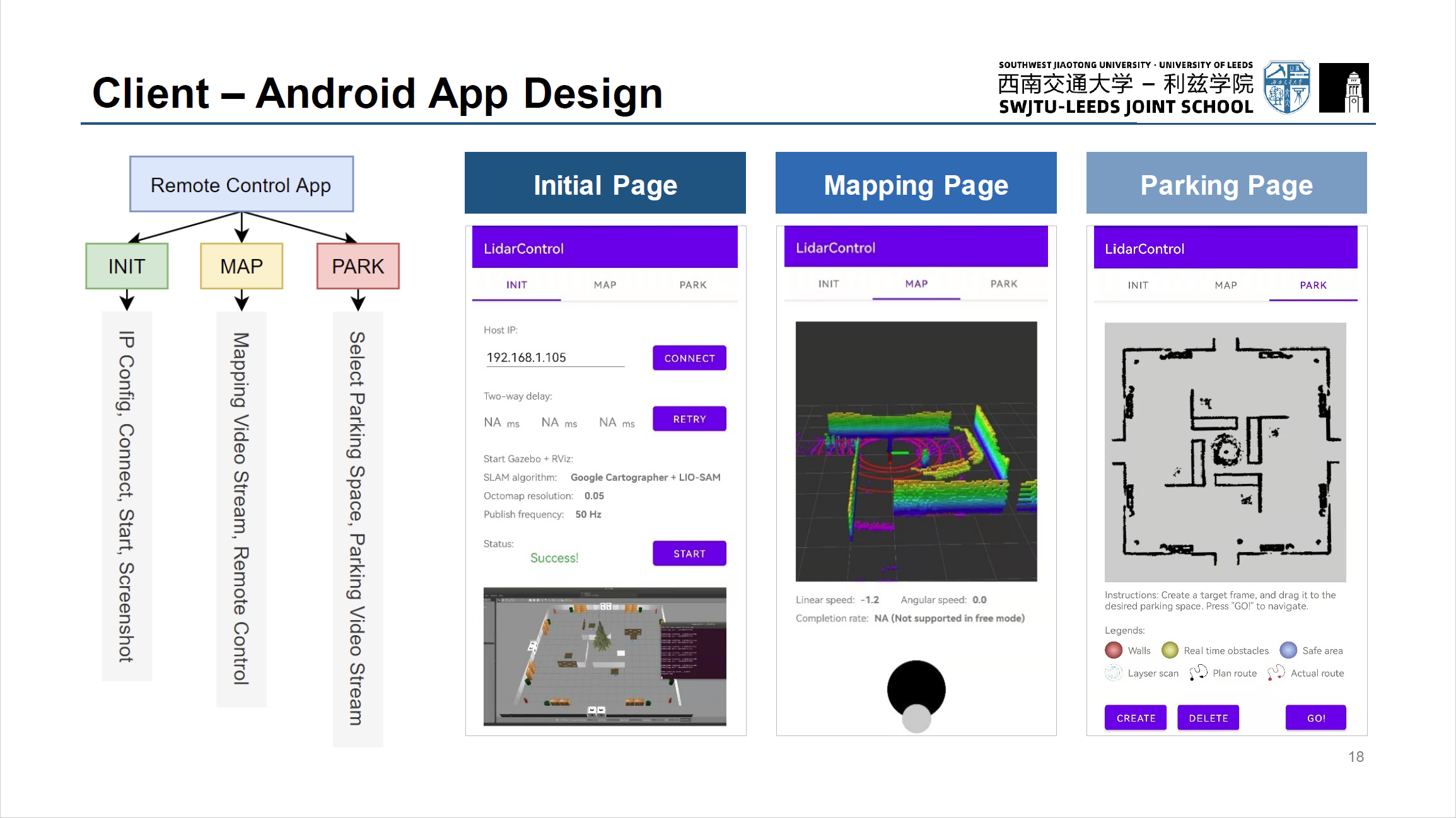
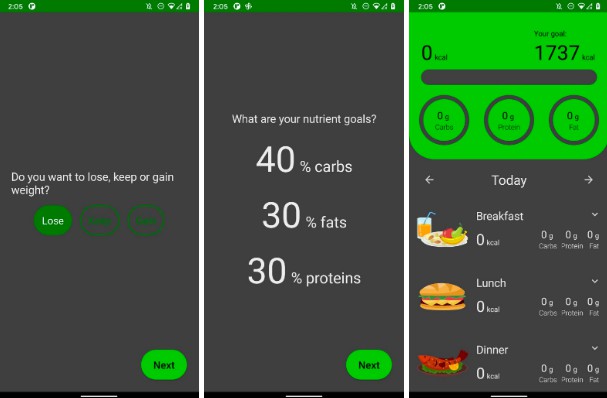
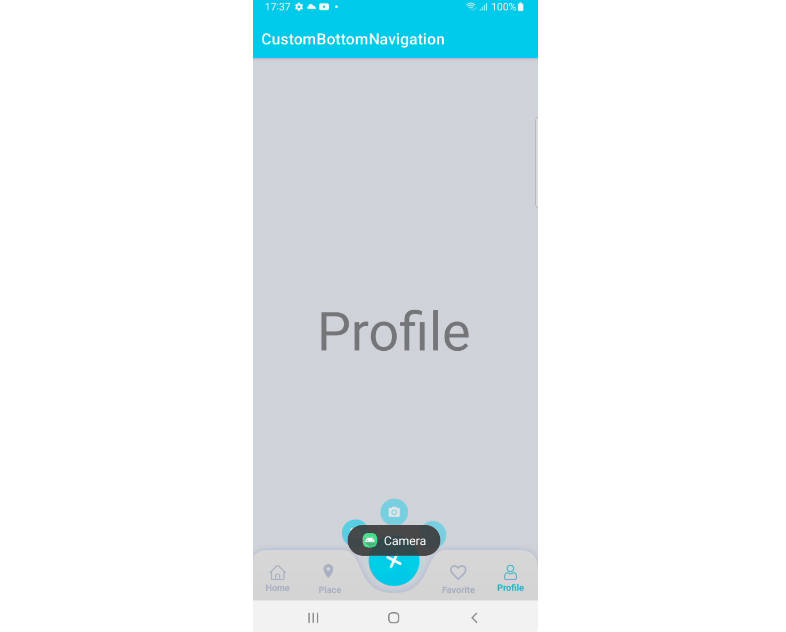
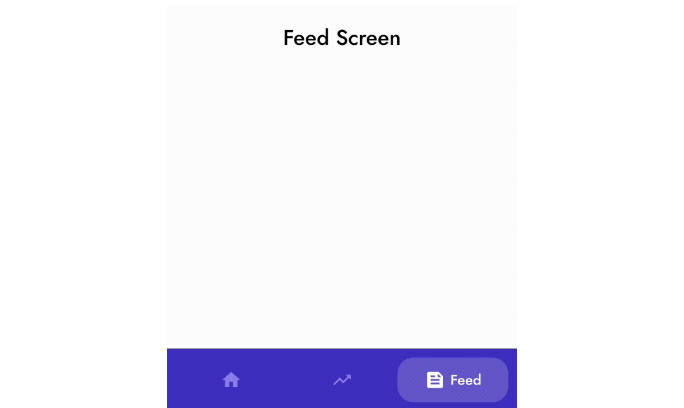
The project highlights that user can remotely view the vehicle’s 3D map building results and navigation status in real-time via WIFI on an Android application and control the vehicle to move or send commands to promptly go to the specified map location.
Poster
See the Poster.pdf in main directory for details.
Preview
This is an Android App for remote SLAM and navigation. Further information could be found in Presentation.pdf.